1、Lidar basics
1、Lidar basics1.1、Overview1.2、SLAM lidar components1.2.1、Laser1.2.2、Receiver1.2.3、Signal processing unit1.2.4、Rotating mechanism1.3、Principle of single-line lidar1.3.1、Triangular Ranging Method1、Direct shot2、Oblique shot1.3.2、TOF Ranging Method1.4、Lidar A1M81.5、Application scenario1.6、Using of A1M81.6.1、Build rplidar ros package1.6.2、Run rplidar ros package1.6.3、Remapping the USB serial port
SLAM Lidar tutorials: https://www.slamtec.com/en/Support
SLAM Lidar Technical Support E-mail:support@slamtec.com
Lidar wiki:http://wiki.ros.org/rplidar
Lidar SDK:https://github.com/Slamtec/rplidar_sdk
Lidar ROS:https://github.com/Slamtec/rplidar_ros
Lidar tutorials:https://github.com/robopeak/rplidar_ros/wiki
1.1、Overview
Single-line lidar refers to a single-line laser beam emitted by the laser source. It is divided into triangular ranging and TOF lidar. It is mainly used in the field of robotics.
Its scanning speed is fast, the resolution is strong, and the reliability is high. Compared with the multi-line lidar, the single-line lidar reacts more quickly in angular frequency and sensitivity, so it is more accurate in the distance and accuracy of obstacle distance measurement.
1.2、SLAM lidar components
SLAM single-line lidar as an example, which is mainly composed of 4 core components: laser, receiver, signal processing unit and rotating mechanism.
1.2.1、Laser
The laser is the laser emitting mechanism of the lidar. During work, it will light up in pulses. The RPLIDAR A3 series SLAM lidar will turn on and off 16000 times per second.
1.2.2、Receiver
After the laser emitted by the laser hits the obstacle, the reflected light will be converged on the receiver through the lens group through the reflection of the obstacle.
1.2.3、Signal processing unit
The signal processing unit is responsible for controlling the emission of the laser and processing the signal received by the receiver. Based on this information, the distance information of the target object is calculated.
1.2.4、Rotating mechanism
The rotating mechanism is responsible for rotating the above-mentioned core components at a stable speed, so as to realize the scanning of the plane and generate real-time plan information.
1.3、Principle of single-line lidar
Working principle of the single-line mechanical rotating mechanism lidar, as shown below.
1.3.1、Triangular Ranging Method
According to the angular relationship between the incident beam and the surface normal of the measured object, the laser triangulation method can be divided into two types: oblique and direct.
1、Direct shot
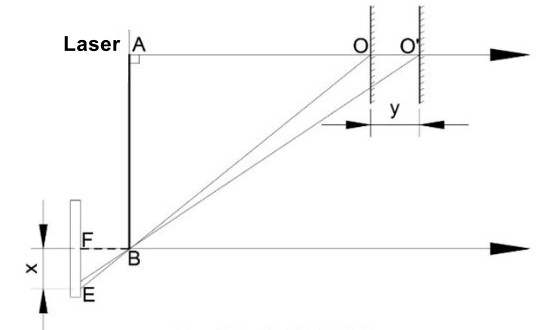
2、Oblique shot
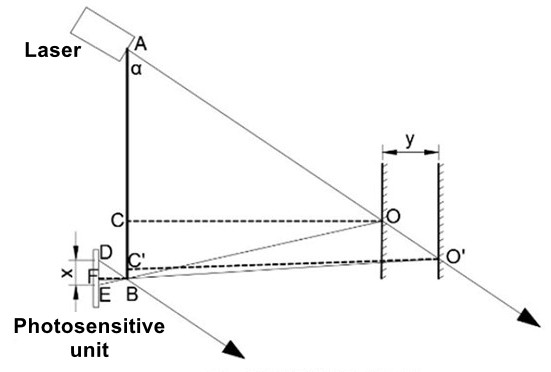
SLAM RPLIDAR series lidar uses the oblique laser triangulation ranging method.
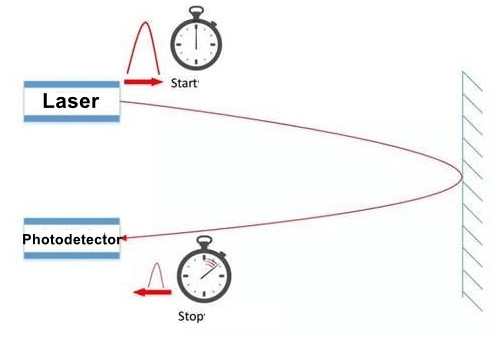
1.3.2、TOF Ranging Method
TOF lidar is based on measuring the flight time of light to obtain the distance of the target. Its working principle is mainly expressed as a laser transmitter sends out a modulated laser signal, the modulated light is reflected by the measured object and then received by the laser detector. The distance to the target can be calculated by measuring the phase difference between the emitted laser and the received laser. .
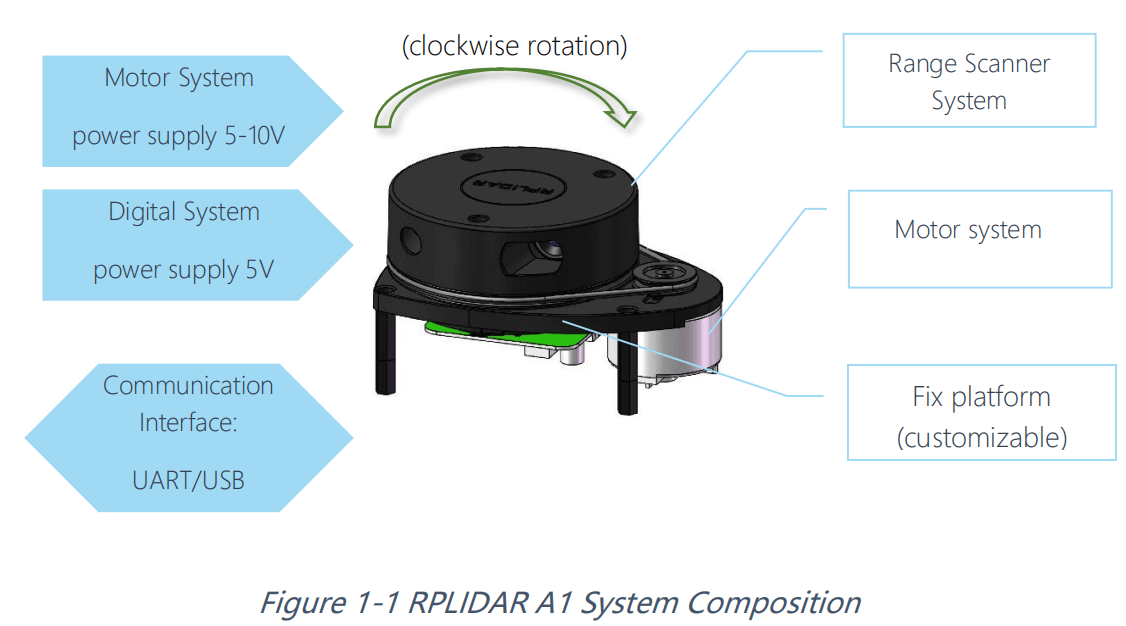
1.4、Lidar A1M8
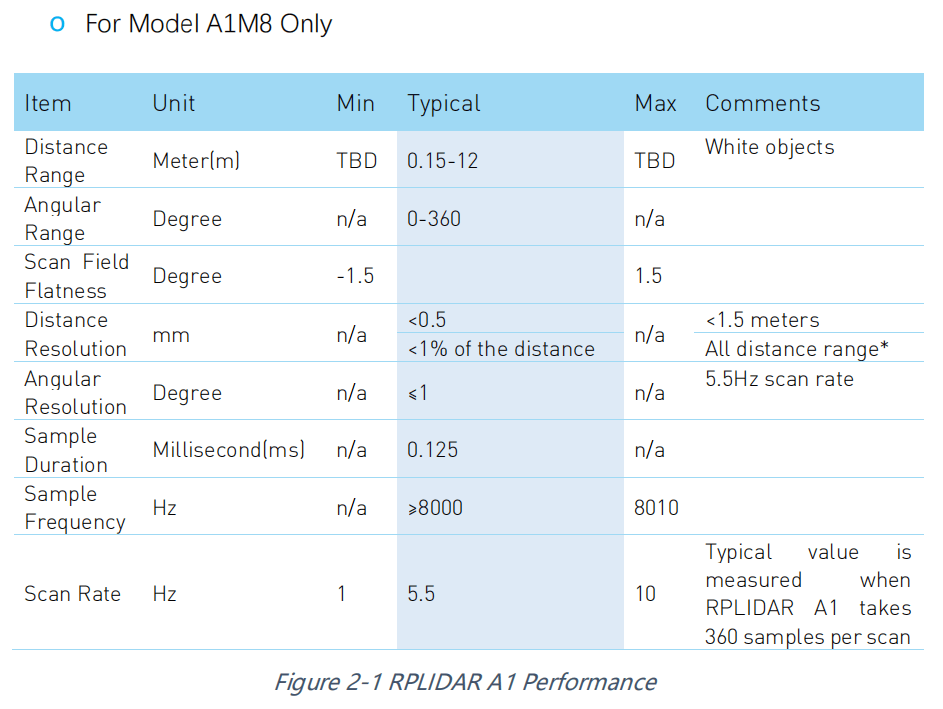
It can be seen from the figure above that parameters such as measurement radius, sampling speed, rotation speed, and angular resolution are important information of lidar performance.
| Information | Description |
|---|---|
| Ranging radius | Radar measurement range |
| Ranging sampling rate | How many ranging outputs are performed in one second |
| Scanning frequency | How many scans the radar does in one second |
| Angular resolution | Angular steps of two adjacent ranging |
| Measurement resolution/accuracy | Can perceive the minimum distance change |
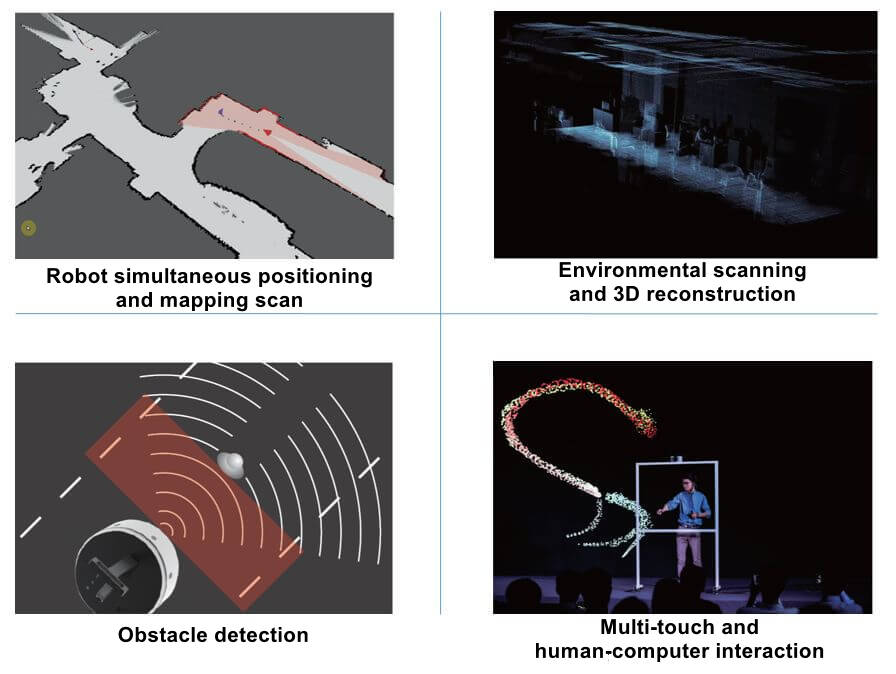
1.5、Application scenario
1.6、Using of A1M8
1.6.1、Build rplidar ros package
Clone this project to your catkin's workspace src folder
Run catkin_make to build rplidarNode and rplidarNodeClient
1.6.2、Run rplidar ros package
View the permissions of the rplidar serial port:
ls -l /dev |grep ttyUSB
Add write permission:(such as /dev/ttyUSB0)
xxxxxxxxxxsudo chmod 666 /dev/ttyUSB0
There are two ways to run the rplidar ros package
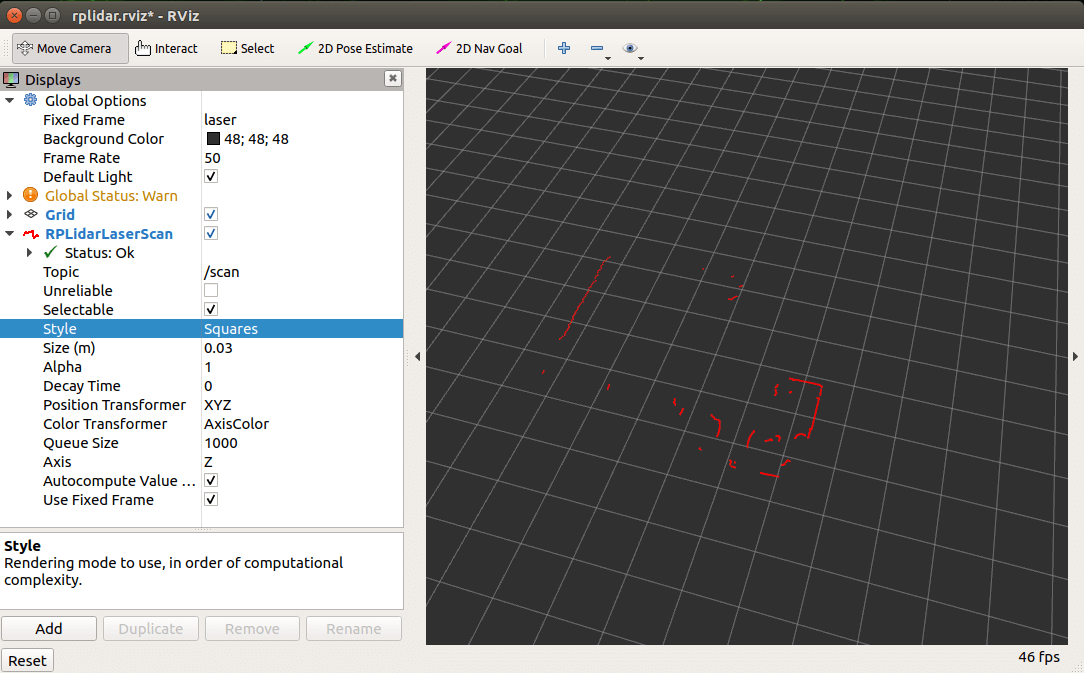
- Run rplidar node, view in rviz
xxxxxxxxxxroslaunch rplidar_ros view_rplidar.launch
You can see rplidar scan results in the rviz
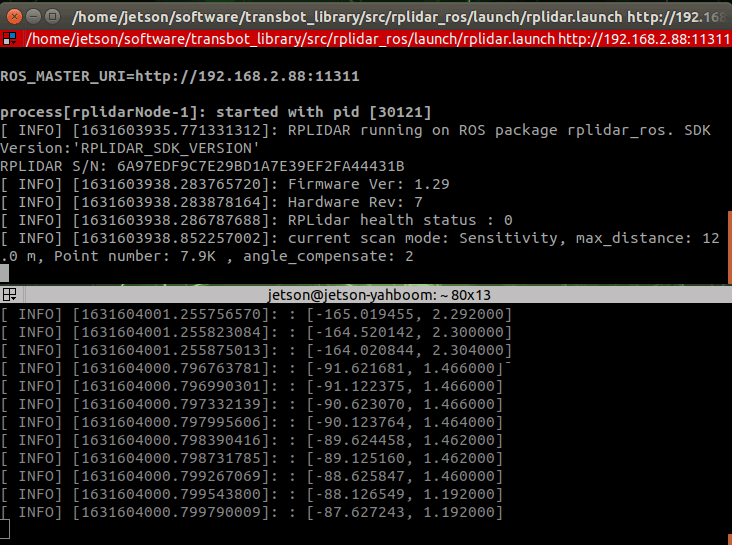
- Run the rplidar node and use the test application to view
xxxxxxxxxxroslaunch rplidar_ros rplidar.launchrosrun rplidar_ros rplidarNodeClient
You can see rplidar scan results in the console
1.6.3、Remapping the USB serial port
In the path of rplidar_ros function package, install USB port remapping:
xxxxxxxxxx./scripts/create_udev_rules.sh
Input following command to modify re-mapping:
xxxxxxxxxxls -l /dev | grep ttyUSB

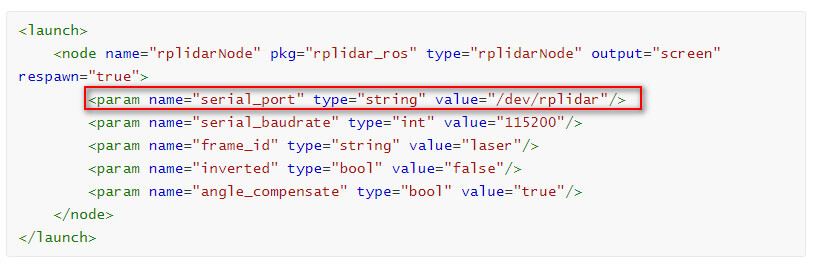
After changing the USB port remapping, we need to change the startup file about the serial_port value.